

GENIITEK-MG10产品路测定位速度+精度分析报告
普通GPS北斗模块在环境复杂的城市环境中定位没有那么精确,时常出现漂移、定位慢、无法定位等情况,比如在高架桥下,在穿山隧道里面,卫星信号微弱或者完全没有卫星信号的环境中,GPS北斗模块是没办法很好的定位的。这种情况下,选用GPS+惯性组合导航模块就是比较好的选择了!
近日,我司推出了最新的GPS北斗/格洛纳斯+惯性组合导航模块MG10, MG10模组融合了北斗高精度卫星定位和惯性导航技术,为复杂的城市环境提供组合导航,适用于各种形态车载终端导航系统,在高架遮挡、山间隧道、城市峡谷、地下停车场等弱(无)卫星信号覆盖场景中,仍能通过惯性导航技术提供连续可靠的高精度定位导航体验。同时,MG10 集成了千寻立见方便客户在不同的应用场景上使用。
卫星+惯性组合导航充分利用惯性导航系统和卫星导航系统优点,基于最优估计算法—卡尔曼滤波算法融合两种导航算法,获得最优的导航结果;在卫星信号微弱或者丢失卫星信号的情况下,利用惯性导航系统使得导航系统继续工作,保证导航系统的正常工作,提高了系统的稳定性和可靠性。
MG10导航模块提出了卫星导航精度的智能识别算法,基于组合导航提供的高精度导航信息,对卫星导航的定位精度进行识别,如果卫星导航精度较好,则进行组合导航,一旦发现卫星导航信号非常差甚至丢失信号,则进行纯惯性导航,总之,MG10导航模块实现了组合导航和纯惯性导航的自主切换。
下面为MG10产品路测+定位速度精度分析报告
1.测试路线

如图所示,为了测试惯性导航模块在定位和速度的性能,在五个复杂区域进行了低速、高速、静止、倒车和转弯各种驾驶行为。
(1)区域1:某城市隧道
(2)区域2:某地下车库
(3)区域3:某地下车库
(4)区域4:某高架下
(5)区域5:某地道
2. 某隧道
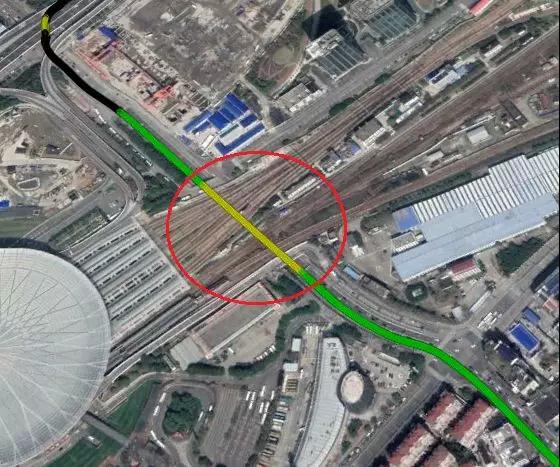
2.1模块的行驶轨迹

某隧道
某隧道
2.2模块行驶速度
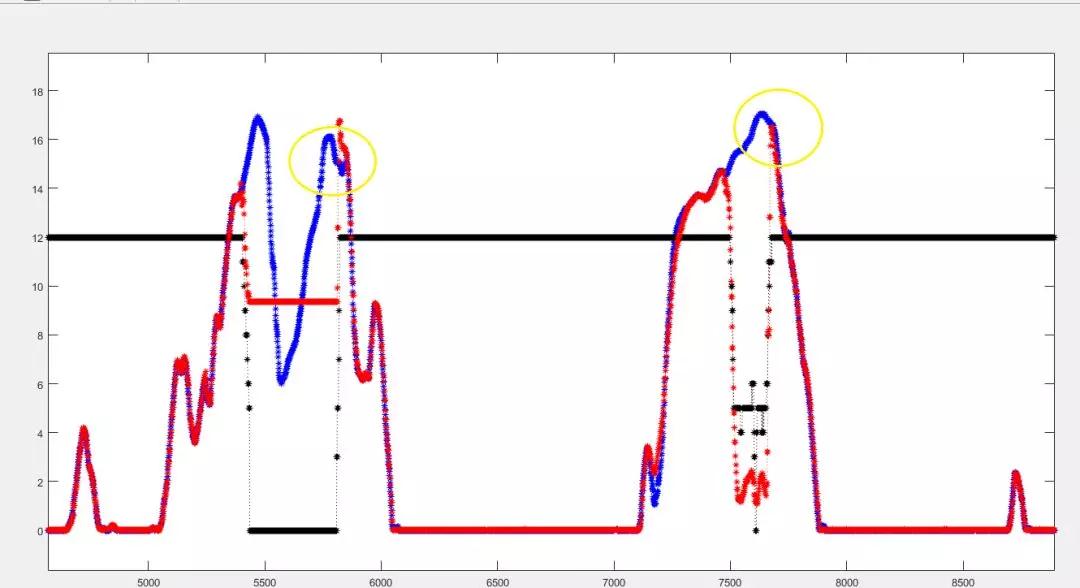
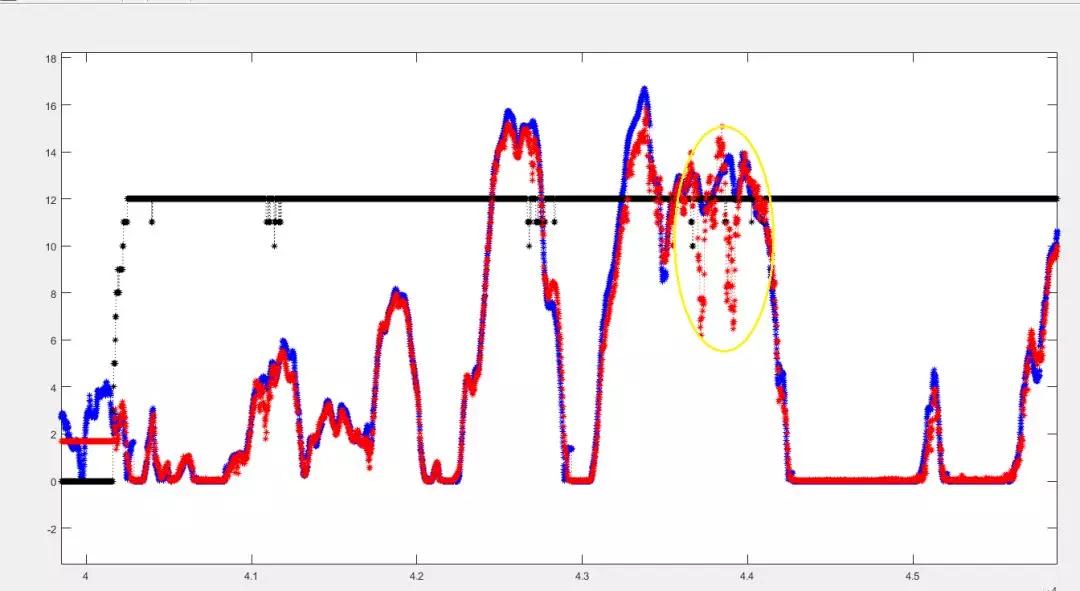
如图所示:红色为卫星定位速度,蓝色为惯性导航定位速度,黑色为卫星数。
在两次隧道内,惯性导航的速度都可以获得较好的效果,尤其是出隧道的地方(黄色区域),卫星导航速度恢复后,惯性导航的速度和卫星导航速度非常接近,表明惯性导航速度的正确性。
3.某车库
3.1模块的行驶轨迹

某地下车库
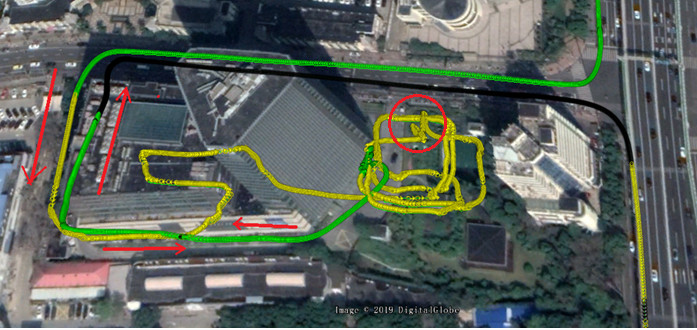
如图所示,在车库内,车辆进行很多各种复杂的车辆驾驶行为:下坡、转弯、倒车、低速、上坡、加速等等,尤其红色区域,车辆在车库内倒车进入一个车位,长期静止。
通过上述驾驶行为,惯性导航还可以获得非常好的车辆轨迹。尤其是在车库的出口可以看出,车辆计入车库和车辆出车库的轨迹非常重合,说明了惯性导航性能的稳定性。
3.2模块行驶速度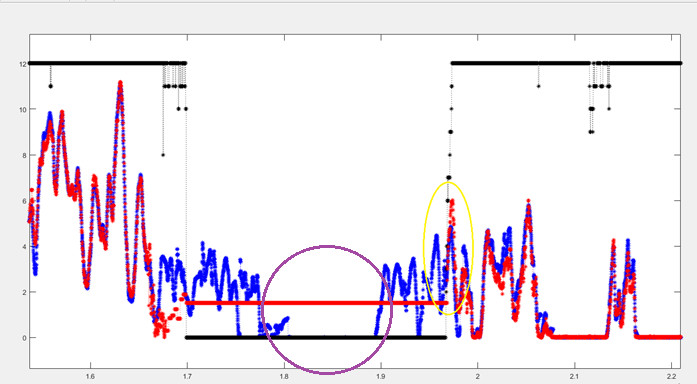
如图所示:红色为卫星定位速度,蓝色为惯性导航定位速度,黑色为卫星数。
在某车库内,惯性导航的速度都可以获得较好的效果,尤其是出车库的地方(黄色区域),卫星导航速度恢复后,惯性导航的速度和卫星导航速度非常接近,表明惯性导航速度的正确性。
另外,车辆倒车入库,静止在一个位置(紫色区域),车辆静止,车速度为零。
4 某地下车库
4.1模块行驶轨迹
如图所示,在车库内,车辆进行很多各种复杂的车辆驾驶行为:下坡、转弯、倒车、低速、上坡、加速等等,尤其红色区域,车辆在车库内倒车进入一个车位,长期静止。
4.2模块行驶速度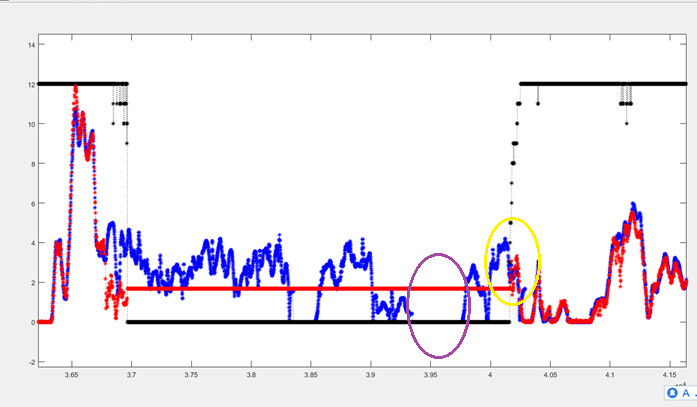
图所示:红色为卫星定位速度,蓝色为惯性导航定位速度,黑色为卫星数。
在某的车库内,惯性导航的速度都可以获得较好的效果,尤其是出车库的地方(黄色区域),卫星导航速度恢复后,惯性导航的速度和卫星导航速度非常接近,表明惯性导航速度的正确性。
另外,车辆倒车入库,静止在一个位置(紫色区域),车辆静止,车速度为零。
5. 某高架下
5.1模块行驶轨迹

如图所示,在高架下,车辆比较多,有段非常拥堵,车辆进行起步、加速、减速、静止等各种驾驶行为,获得较好定位效果。
5.2模块速度信息
在高架下,车辆速度如图所示,在遮挡非常严重的地方,可以看出,卫星导航的车速会有非常大的抖动,误差很大,而惯性导航的速度非常平滑,与真实车辆速度更加接近。
6. 某地道下
6.1 模块轨迹
6.2模块速度信息

7 小结
本次测试通过进入隧道、车库、高架下来验证惯性导航的定位和测速的性能,总结如下:
(1)惯性导航模块行驶轨迹和实际的车辆行驶轨迹非常接近;
(2)惯性导航模块行驶速度和实际车速一致性非常高。
(3)在拥堵的高架下,模块的定位和速度性能表现的都非常不错。

